ผู้จัดจำหน่ายและนำเข้าเครื่องมือสำรวจHI-TARGET | โทร 02-019-1713, 02-318-3688, 02-318-3689

Tilt Survey IMU คืออะไร
สำหรับเครื่องรับสัญญาณดาวเทียม GNSS รุ่นที่มีฟังก์ชั่นการทำงานรังวัดแบบ Tilt Survey จะสามารถแบ่งออกเป็น 2 ระบบหลักๆ เพื่อเป็นตัวช่วยในการตรวจสอบค่าการเอียงตัวของเครื่องรับสัญญาณดาวเทียม GNSS ได้ดังนี้
- ระบบ MEMS
ระบบ MEMS หรือชื่อเต็มๆ คือ Micro Electro Mechanical Systems เป็นระบบเซนเซอร์ที่ช่วยในการตรวจสอบการเอียงตัว เพื่อให้ทราบการเคลื่อนตัวในรูปแบบ 3 แกน คือ Yaw, Roll และ Pitch โดยระบบ MEMS นี้ ผู้ใช้งานจำเป็นต้องทำการ Calibrate เครื่องด้วยตัวเอง ตามระยะเวลาที่เครื่องกำหนดทุกๆ 30-180 วัน วิธีการ Calibrate เครื่องมือจะขั้นตอนอยู่ 3 ขั้นตอน คือ การ Calibrate Electronic bubble, การ Calibrate Orientation และการ Calibrate Magnetic แต่ทั้งนี้ระบบ MEMS จะมีข้อจำกัดในเรื่องของการถูกรบกวนจากคลื่นแม่เหล็กไฟฟ้าหรือโลหะต่างๆ ในกรณีที่มีการทำงานใกล้สภาวะแวดล้อมดังกล่าว อาจทำให้ระบบเซนเซอร์มีค่าความคลาดเคลื่อนแฝงเกิดขึ้นได้
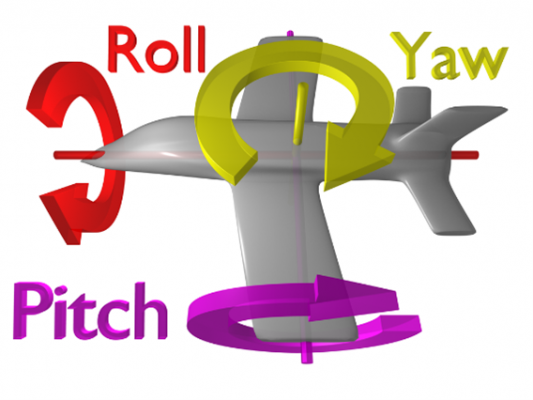
ที่มา : https://en.wikipedia.org/wiki/Inertial_measurement_unit#/media/File:Flight_dynamics_with_text.png
- ระบบ IMU
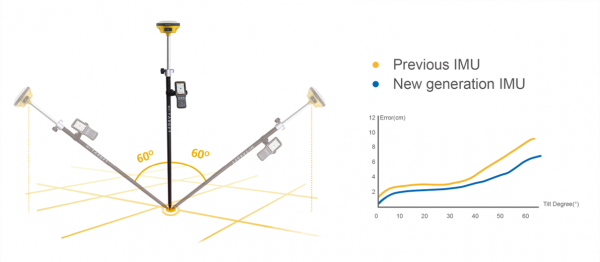
ระบบ IMU หรือชื่อเต็มๆ คือ Initial Measurement Unit เป็นระบบเซนเซอร์ที่ทำการตรวจสอบความเร่ง การเอียงในทิศทางต่างๆ ได้อย่างแม่นยำขึ้นกว่าระบบ MEMS และลดข้อจำกัดการรบกวนของสนามแม่เหล็กไฟฟ้าหรือโลหะต่างๆ นอกจากนี้ขั้นตอนในการ Calibrate ยังสามารถทำได้ง่ายและรวดเร็วมากขึ้นกว่าระบบ MEMS และยังทำให้การใช้งานรังวัดตรวจสอบการเอียงหรือการรังวัดแบบ Tile Survey รังวัดได้อย่างรวดเร็วและแม่นยำมากขึ้น
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: This email address is being protected from spambots. You need JavaScript enabled to view it.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
[Online]. Available: https://issuu.com/iskd/docs/space_geo [2022, Feb. 23]
[Online]. Available: https://th.jf-parede.pt/imu-sensor-working-its-applications [2022, Feb. 23]
[Online]. Available: https://www.slideshare.net/hunchxx/inertial-measurement-unit [2022, Feb. 23]




