ผู้จัดจำหน่ายและนำเข้าเครื่องมือสำรวจHI-TARGET | โทร 02-019-1713, 02-318-3688, 02-318-3689




ติดต่อสอบถาม
02-019-1713
02-318-3688
02-318-3689
02-318-3688
02-318-3689


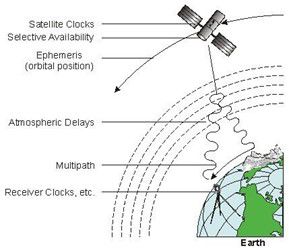
ที่มา : https://www.ocean-yachting.com/gps-error-sources
ความคลาดเคลื่อนสามารถเกิดขึ้นได้ในงานรังวัดเสมอ ไม่ว่าจะเป็นความคลาดเคลื่อนที่เกิดจากอุปกรณ์หรือสภาพแวดล้อมในขณะทำงาน หากเราสามารถหลีกเลี่ยงค่าความคลาดเคลื่อนเหล่านี้ให้เกิดน้อยลงก็ส่งผลดีต่องานรังวัดด้วยดาวเทียมระบบ GPS
ความคลาดเคลื่อนที่ส่งผลต่องานรังวัดด้วยดาวเทียมระบบ GPS มีดังต่อไปนี้
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4#เครื่องมือสำรวจ#GPS
อ้างอิง
วิชัย เยี่ยงวีรชน. การสํารวจรังวัดทฤษฎีและการประยุกต์ใช้ (พิมพ์ครั้งที่ 3) กรุงเทพมหานคร : สํานักพิมพ์แห่งจุฬาลงกรณ์มหาวิทยาลัย.2552
[Online]. Available: http://osm.ldd.go.th/web_forest/pdf_file/gps1.pdf [2022, Aug. 19]
[Online]. Available: http://gps.rid.go.th/engineer/unitschool/%E0%B8%9C%E0%B8%A5%E0%B8%87%E0%B8%B2%E0%
B8%99%E0%B9%80%E0%B8%A3%E0%B8%B7%E0%B9%88%E0%B8%AD%E0%B8%87%E0%B8%97%E0%B8%B5%E0%B9%882.pdf [2022, Aug. 19]
[Online]. Available: https://www.ocean-yachting.com/gps-error-sources [2022, Aug. 19]
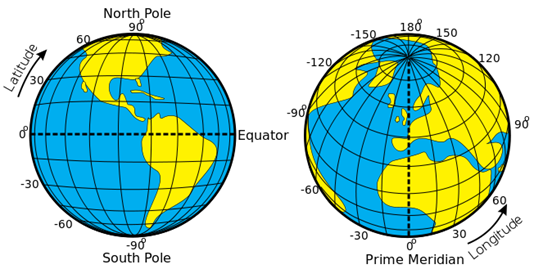
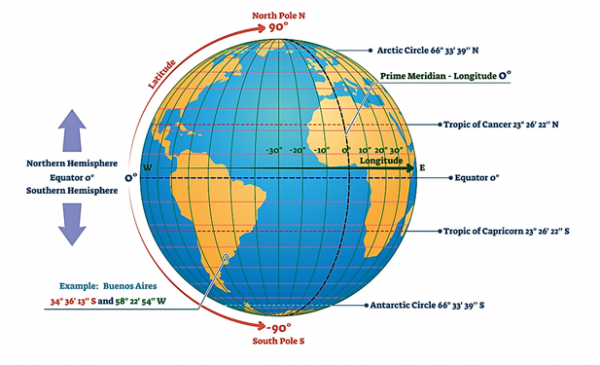
ระบบพิกัดภูมิศาสตร์ (Geographic Coordinate System) เป็นระบบพิกัดที่ใช้บอกค่าตําแหน่งต่างๆบนพื้นโลก โดยวิธีการอ้างอิงตําแหน่งเป็นค่าระยะเชิงมุมแบบละติจูด (Latitude) และลองติจูด (Longitude) ตามค่าระยะเชิงมุมที่ห่างจากศูนย์กําเนิด (Origin) ของละติจูดและลองติจูดที่กําหนดขึ้นสําหรับศูนย์จุดกําเนิดของละติจูด (Origin of Latitude) นั้นเกิดขึ้นจากแนวระดับที่ตัดผ่านศูนย์กลางของโลกและตั้งฉากกับแกนหมุน เราเรียกแนวระนาบศูนย์กําเนิดนั้นว่า เส้นศูนย์สูตร (Equator) ซึ่งจะทำการแบ่งโลกออกเป็น 2 ซีกคือ ซีกโลกเหนือและซีกโลกใต้ โดยค่าระยเชิงมุมของละติจูด จะเป็นค่าเชิงมุมที่เกิดจากมุมที่ศูนย์กลางของโลก กับแนวระดับฐาน กําเนิดมุมที่เส้นศูนย์สูตร ที่วัดค่าของมุมออกไปทั้งซีกโลกเหนือและซีกโลกใต้ค่าของมุมจะสิ้นสุดที่ขั้วโลกเหนือและขั้วโลกใต้มีค่าเชิงมุม 90 องศาพอดี
ที่มา : https://www.plux.co.uk/converting-radians-in-degrees-latitude-and-longitude/
ดังนั้นการใช้ค่าระยะเชิงมุมของละติจูดอ้างอิง เพื่อบอกตําแหน่งต่างๆ การกําหนดเรียกค่าวัดระบบพิกัดภูมิศาสตร์จะถูกเรียกเป็นหน่วย องศา ลิปดา และฟิลิปดา และจะบอกซีกโลกเหนือหรือซีกโลกใต้กํากับไว้เสมอ เช่น ละติจูดที่ 40 องศา 10 ลิปดา 15 ฟิลิปดาเหนือ ส่วนศูนย์จุดกําหนดของลองติจูด (Origin of Longitude) นั้นจะถูกกําหนดขึ้นจากแนวระนาบทางตั้งที่ผ่านแกนหมุนของโลกตรงบริเวณตําแหน่งบนพื้นโลกที่ผ่านหอดูดาวเมืองกรีนิช (Greenwich) ประเทศอังกฤษ เรียกศูนย์กําเนิดนี้ว่า เส้นเมอริเดียนเริ่มแรก (Prime Meridian) เป็นเส้นที่แบ่งโลกออกเป็นซีกโลกตะวันตกและซีกโลกตะวันออก ค่าระยะเชิงมุมของลองติจูดเป็นค่าที่วัดมุมออกไปทางตะวันตกและตะวันออกของเส้นเมอริเดียนเริ่มแรก วัดจากศูนย์กลางของโลกตามแนวระนาบที่มีเส้นเมอริเดียนเริ่มแรกเป็นฐานกําเนิดมุมค่าของมุมจะสิ้นสุดที่เส้นเมอริเดียน ตรงข้ามเส้นเมอริเดียนเริ่มแรกมีค่าของมุมซีกโลกละ 180 องศา การใช้ค่าอ้างอิงบอกตําแหน่งก็เรียกกําหนดเช่นเดียวกับ ละติจูด แต่ต่างกันที่จะต้องบอกเป็นซีกโลกตะวันตก หรือตะวันออกแทน เช่น ลองติจูด ที่ 90 องศา 00 ลิปดา 00 ฟิลิปดาตะวันตก
ที่มา : https://blogs.lincoln.ac.nz/gis/2021/08/20/whats-so-primo-about-the-prime-meridian/
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4#เครื่องมือสำรวจ#GPS
อ้างอิง
[Online]. Available: https://old.elearning.yru.ac.th/pluginfile.php/43260/mod_resource/content/2/%E0%B8%9E%E0%
B8%B4%E0%B8%81%E0%B8%B1%E0%B8%94.pdf [2022, July. 25]
[Online]. https://blogs.lincoln.ac.nz/gis/2021/08/20/whats-so-primo-about-the-prime-meridian/[2022, July. 25]
[Online]. https://gisgeography.com/decimal-degrees-dd-minutes-seconds-dms/[2022, July. 25]
RTK และ RTK GNSS Network ต่างกันอย่างไร
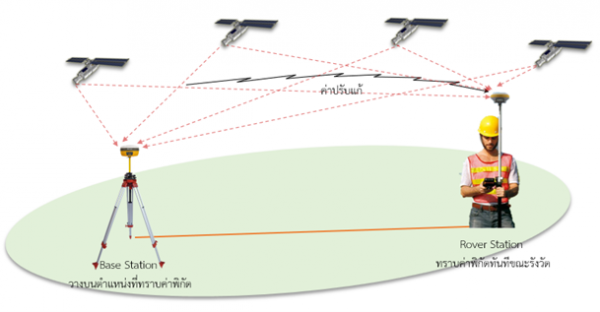
Real Time Kinematic Survey หรือที่เราคุ้นชินกับชื่อที่เรียกกันว่า RTK ซึ่งหลักการทำงานนั้น คือ ต้องใช้เครื่องรับสัญญาณดาวเทียมอย่างน้อย 2 เครื่อง โดยเครื่องที่หนึ่งจะถูกวางไว้บนตำแหน่งหมุดหลักฐานที่ทราบค่าพิกัดหรือสถานีหลัก (Base) ส่วนเครื่องรับเครื่องที่สองถูกนำไปวางรับสัญญาณตามจุดที่ต้องการทราบค่าพิกัด (Rover) โดยทั้งสองเครื่องจะสื่อสารกันระหว่างเครื่องรับทั้งสอง ด้วยวิธีเครื่องรับและส่งคลื่นวิทยุหรือการใช้โทรศัพท์มือถือและอาศัยสัญญาณอินเทอร์เน็ต ทำให้ เครื่องรับสัญญาณดาวเทียม Rover สามารถทราบค่าตำแหน่งที่ถูกต้องหน้างานได้ในทันที โดยไม่ต้องผ่านการประมวลผลด้วยซอฟต์แวร์ภายหลัง โดยตัวเครื่อง Base และเครื่อง Rover ต้องรับข้อมูลจากดาวเทียมกลุ่มเดียวกันและช่วงเวลาเดียวกันอย่างน้อย 5 ดวง (รายละเอียดเพิ่มเติมสามารถอ่านได้ที่หน้าเว็บข่าวสารและกิจกรรมของบริษัท UniversalCorp https://www.universalcorp.co.th/blog )
RTK GNSS Network หรือที่เรารู้จักกันในอีกชื่อคือ ระบบโครงข่าย CORS (Continuously Operating Reference Stations) สถานีรับสัญญาณดาวเทียม GNSS ถาวรแบบต่อเนื่องตลอด 24 ชั่วโมง โดยสถานีรับสัญญาณดาวเทียม GNSS จะส่งสัญญาณค่าปรับแก้ไปในรูปแบบโครงข่าย ทำให้ได้ค่าประมวลผลเชิงตำแหน่งที่มีความถูกต้องแม่นยำสูงในเวลาอันรวดเร็ว วิธีการนี้สามารถให้ค่าความถูกต้องในระดับ 1 -5 เซนติเมตร (สำหรับเส้นฐานที่ยาวไม่เกิน 15 กิโลเมตร) มีหลักในการทำงานคล้ายคลึงกับวิธีการรังวัดแบบ RTK แต่แตกต่างกันที่ ผู้ใช้งานจำเป็นต้องขอรหัสผู้ใช้ (User Name) จากผู้ให้บริการระบบเครือข่ายสถานีฐานจีพีเอส (ซึ่งในตอนนี้หน่วยงานที่เปิดให้บริการในประเทศไทยมีอยู่หลายหน่วยงาน) โดยที่ผู้ใช้งานใช้เครื่องรับสัญญาณเพียงเครื่องเดียวไปวางตามจุดที่ต้องการทราบค่าพิกัดภายในพื้นที่ระบบเครือข่ายสถานีฐานฯ (รายละเอียดเพิ่มเติมสามารถอ่านได้ที่หน้าเว็บข่าวสารและกิจกรรมของบริษัท UniversalCorp https://www.universalcorp.co.th/blog )
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
กองเทคโนโลยีทำแผนที่. คู่มือการรังวัดโดยระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network). กรมที่ดิน กระทรวงมหาดไทย.2565
[Online]. Available: https://www.hii.or.th/งานวิจัย/งานวิจัยและพัฒนา/ระบบโครงข่ายขการรังวัด [2022, Feb. 09]
ร.ท.วัลลพ ตาเขียว เอกสารประกอบวิชาการ การสำรวจด้วยดาวเทียม (Satellite Surveying) กรมแผนที่ทหาร. 2560.
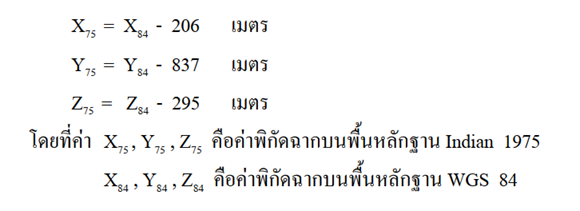
การแปลงพื้นหลักฐานระหว่าง WGS 84 และ Indian 1975
( Datum Transformation between WGS 84 and Indian 1975 )
ที่มา : https://gisgeography.com/wgs84-world-geodetic-system/
กรมแผนที่ทหารได้มีการปรับเปลี่ยนวิธีการสำรวจโครงข่ายหมุดหลักฐานทางราบจากวิธีการสำรวจด้วยกล้องมาเป็นการสำรวจด้วยดาวเทียม GPS ตั้งแต่ปี พ.ศ.2534 ซึ่งมีจุดกำเนิดอยู่ที่เขาสะแกกรัง จังหวัดอุทัยธานี โดยประเทศไทยยังใช้พื้นหลักฐานทางราบเป็นพื้นหลักฐาน Indian 1975 เป็นตัวอ้างอิง และรูปทรงรี คือ Everest ในขณะที่การสำรวจด้วยดาวเทียม GPS กับพื้นหลักฐาน WGS 84 มีค่าจุดอ้างอิงและรูปทรงรีที่แตกต่างกัน ทำให้ค่าพิกัดหมุดเดียวกันมีค่าแตกต่างกัน จึงทำให้จำเป็นต้องมีการเป็นค่าพิกัดจากพื้นหลักฐาน WGS 84 มาเป็นค่าพิกัดบนพื้นหลักฐาน Indian 1975 จากการสำรวจด้วยดาวเทียม GPS
ซึ่งการแปลงค่าพื้นหลักฐานจาก Indian 1975 มาเป็น WGS 84 ได้รับความช่วยเหลือจาก Defense Mapping Agency (DMA) แห่งสหรัฐอเมริกา จากการใช้ข้อมูลของการรังวัดสถานี Doppler ของระบบดาวเทียม Transit ได้ค่าความสัมพันธ์ คือ
ซึ่งค่าความสัมพันธ์ดังกล่าวยังถือว่ามีค่าความละเอียดถูกต้องยังไม่สูงมากเนื่องจากหมุดควบคุมในงานขยายโครงข่ายมีจุดกำเนิดแค่จุดเดียวที่เขาสะแกกรัง หลังจากกรมแผนที่ทหารได้รับความช่วยเหลือจากองค์กรทางด้านยีออเดซี่จากหลายหน่วยงานต่างประเทศ โดยเฉพาะการสำรวจโครงข่ายหมุดหลักฐานชั้น Zero Order หรือ Class AA ตามมาตรฐาน FGCC (Federal Geodetic Control Committee) แห่งสหรัฐอเมริกาที่มีการรังวัดค่าแบบสัมบูรณ์ที่มีความละเอียดถูกต้องสูง ทำให้ได้หมุดหลักฐานจำนวน 7 หมุด จนในปี พ.ศ. 2545 กรมแผนที่ทหารได้รวบรวมข้อมูลการรังวัด GPS ทั้งหมด เพื่อนำมาปรับแก้โครงข่ายหมุดหลักฐานทางราบพร้อมกันจนได้โครงข่ายที่มีความถูกต้องน่าเชื่อถือสูง และกระจายตัวอย่างดีโดยการแปลงค่าพิกัดแบบ Geodetic Coordinates มาเป็นค่าพิกัดฉาก 3 มิติ (X,Y,Z) โดยค่าตัวแปรข้อมูลคือค่าพิกัดของหมุดหลักฐานที่ทราบค่าบนพื้นหลักฐานจำนวน 16 หมุด และได้มีการนำค่าความสูงเหนือทรงรี (Ellipsoid Height : h) เข้ามาประยุกต์ใช้เพื่อให้ได้ค่า h (สูตรการหาค่า h สามารถอ่านได้เพิ่มเติมที่เว็บข่าวสารหัวข้อเรื่อง Geoid (จีออยด์) https://www.universalcorp.co.th/all-blogs/item/8-5145 ) บนหมุดหลักฐานทั้ง 16 หมุด ผลการแปลงค่าโดยการคำนวณปรับแก้ระบบ Least Square Adjustment ด้วยซอฟต์แวร์ SKI-PRO ทำให้ได้ค่าความสัมพันธ์ระหว่างสองพื้นหลักฐานในการแปลงค่าพารามิเตอร์พื้นหลักฐาน WGS84 และ Indian 1975 ดังนี้ 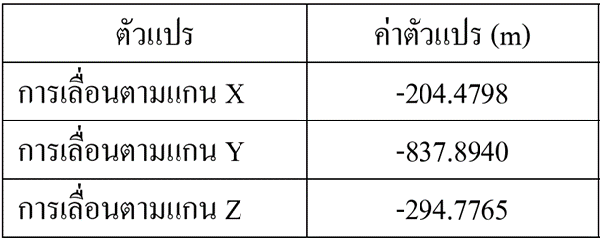
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
พ.อ.เอื้อมเกียรติ เจริญสม. รายงานผลการศึกษาวิจัย เรื่องการแปลงพื้นหลักฐานระหว่าง WGS84 และ Indian 1975 (Datum Transformation between WGS84 and Indian 1975). กรมแผนที่ทหาร.2565
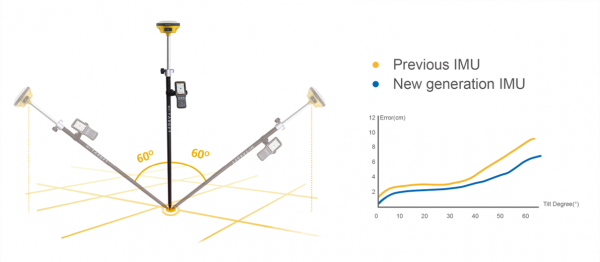
Tilt Survey IMU คืออะไร
สำหรับเครื่องรับสัญญาณดาวเทียม GNSS รุ่นที่มีฟังก์ชั่นการทำงานรังวัดแบบ Tilt Survey จะสามารถแบ่งออกเป็น 2 ระบบหลักๆ เพื่อเป็นตัวช่วยในการตรวจสอบค่าการเอียงตัวของเครื่องรับสัญญาณดาวเทียม GNSS ได้ดังนี้
ระบบ MEMS หรือชื่อเต็มๆ คือ Micro Electro Mechanical Systems เป็นระบบเซนเซอร์ที่ช่วยในการตรวจสอบการเอียงตัว เพื่อให้ทราบการเคลื่อนตัวในรูปแบบ 3 แกน คือ Yaw, Roll และ Pitch โดยระบบ MEMS นี้ ผู้ใช้งานจำเป็นต้องทำการ Calibrate เครื่องด้วยตัวเอง ตามระยะเวลาที่เครื่องกำหนดทุกๆ 30-180 วัน วิธีการ Calibrate เครื่องมือจะขั้นตอนอยู่ 3 ขั้นตอน คือ การ Calibrate Electronic bubble, การ Calibrate Orientation และการ Calibrate Magnetic แต่ทั้งนี้ระบบ MEMS จะมีข้อจำกัดในเรื่องของการถูกรบกวนจากคลื่นแม่เหล็กไฟฟ้าหรือโลหะต่างๆ ในกรณีที่มีการทำงานใกล้สภาวะแวดล้อมดังกล่าว อาจทำให้ระบบเซนเซอร์มีค่าความคลาดเคลื่อนแฝงเกิดขึ้นได้
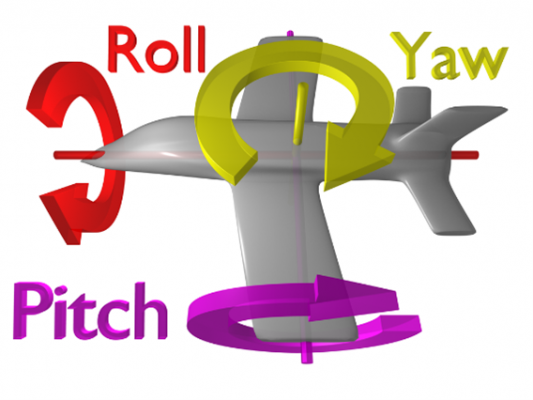
ที่มา : https://en.wikipedia.org/wiki/Inertial_measurement_unit#/media/File:Flight_dynamics_with_text.png
ระบบ IMU หรือชื่อเต็มๆ คือ Initial Measurement Unit เป็นระบบเซนเซอร์ที่ทำการตรวจสอบความเร่ง การเอียงในทิศทางต่างๆ ได้อย่างแม่นยำขึ้นกว่าระบบ MEMS และลดข้อจำกัดการรบกวนของสนามแม่เหล็กไฟฟ้าหรือโลหะต่างๆ นอกจากนี้ขั้นตอนในการ Calibrate ยังสามารถทำได้ง่ายและรวดเร็วมากขึ้นกว่าระบบ MEMS และยังทำให้การใช้งานรังวัดตรวจสอบการเอียงหรือการรังวัดแบบ Tile Survey รังวัดได้อย่างรวดเร็วและแม่นยำมากขึ้น
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
[Online]. Available: https://issuu.com/iskd/docs/space_geo [2022, Feb. 23]
[Online]. Available: https://th.jf-parede.pt/imu-sensor-working-its-applications [2022, Feb. 23]
[Online]. Available: https://www.slideshare.net/hunchxx/inertial-measurement-unit [2022, Feb. 23]
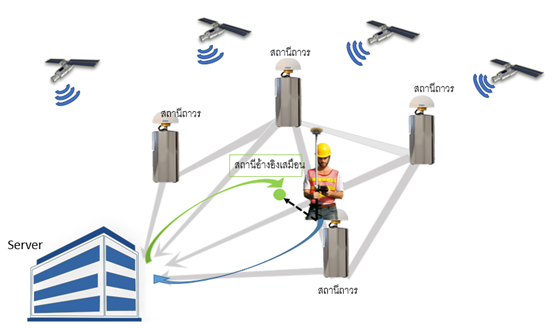
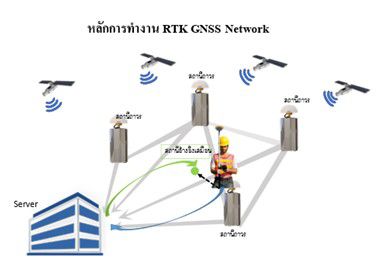
ระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network)
ระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network) คือ ระบบการรับสัญญาณ
ดาวเทียมแบบจลน์ โดยจะทำให้ได้ค่าพิกัด ณ ตำแหน่งที่ทำการรังวัดทันที ในบริเวณพื้นที่โครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ โดยระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network) จะประกอบไปด้วย สถานีรับสัญญาณดาวเทียมอ้างอิง (CORS), ศูนย์ควบคุม (Control Center), เครื่องรับสัญญาณดาวเทียมแบบเคลื่อนที่ (Rover) และระบบสื่อสาร ทั้งนี้ระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network) ถือเป็นระบบพื้นฐานด้านการสำรวจและการทำแผนที่ ที่มีการติดตั้งและใช้งานกันอย่างแพร่หลายในหลายๆประเทศทั่วโลก
หลักการทำงานของระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network) ประกอบไปด้วย
1) สถานีรับสัญญาณดาวเทียมอ้างอิง (CORS) จะรับสัญญาณและบันทึกข้อมูลดาวเทียมแบบต่อเนื่อง ตลอด 24 ชั่วโมงและส่งข้อมูลดาวเทียมไปยังศูนย์ควบคุม (Control Center)
2) เครื่องรับสัญญาณดาวเทียมแบบเคลื่อนที่ (Rover) ของผู้ใช้งาน ต้องรับสัญญาณดาวเทียมได้ในพื้นที่ตำแหน่งที่ต้องการทราบค่าพิกัด จากนั้นผู้ใช้งานต้องเชื่อมต่อเครื่องรับสัญญาณดาวเทียมแบบเคลื่อนที่ (Rover) ผ่านทางระบบสื่อสาร เพื่อส่งค่าพิกัดไปยังศูนย์ควบคุม (Control Center)
3) ระบบประมวลผลของศูนย์ควบคุม (Control Center) จะทำการสร้างตำแหน่งสถานีอ้างอิงเสมือน (VRS) อยู่ในพื้นที่ใกล้ๆ กับเครื่องรับสัญญาณดาวเทียมแบบเคลื่อนที่ (Rover) ของผู้ใช้งาน
4) การคำนวณค่าพิกัดของผู้ใช้งานจากสถานีอ้างอิงเสมือน (VRS) จะเปรียบเสมือนการรังวัดด้วย
ระบบดาวเทียม GNSS ที่มีค่าระยะเส้นฐานสั้นๆ ผู้ใช้งานจะได้รับค่าพิกัดที่มีค่าความถูกต้องแม่นยำสูงและสะดวกรวดเร็ว
ในตอนนี้ประเทศไทยได้มีหลายหน่วยงานในการจัดตั้งสถานีรับสัญญาณดาวเทียมอ้างอิง (CORS) ขึ้นเพื่อให้บริการในพื้นที่ประเทศไทย ซึ่งประกอบไปด้วย กรมที่ดิน, กรมโยธาธิการและผังเมือง, กรมแผนที่ทหาร และสถาบันสารสรเทศทรัพยากรน้ำ
ที่มา : https://dol-rtknetwork.com/index.php/npage/view/2
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
กองเทคโนโลยีทำแผนที่. คู่มือการรังวัดโดยระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network). กรมที่ดิน กระทรวงมหาดไทย.2565
[Online]. Available: https://www.hii.or.th/งานวิจัย/งานวิจัยและพัฒนา/ระบบโครงข่ายขการรังวัด [2022, Feb. 09]

ระบบโครงข่ายสถานีรับสัญญาณดาวเทียม CORS
CORS ย่อมาจาก Continuously Operating Reference Stations คือ สถานีรับสัญญาณดาวเทียม GNSS ถาวรแบบต่อเนื่องตลอด 24 ชั่วโมง โดยสถานีรับสัญญาณดาวเทียม GNSS จะส่งสัญญาณค่าปรับแก้ไปในรูปแบบโครงข่าย ทำให้ได้ค่าประมวลผลเชิงตำแหน่งที่มีความถูกต้องแม่นยำสูงในเวลาอันรวดเร็ว ค่าข้อมูลที่ได้จะถูกนำไปใช้ในการอ้างอิงระบุตำแหน่งพิกัด และใช้เป็นสถานีอ้างอิงสำหรับการรังวัดแบบ RTK (Real Time Kinematic) และแบบ Network RTK ในปัจจุบันได้มีการนำไปประยุกต์ใช้งานทั้งด้าน การก่อสร้าง ด้านการสำรวจ ด้านอุตสาหกรรมการเกษตร ด้านงานเหมือง และในด้านการวิจัย

ข้อดีในการใช้งานระบบโครงข่ายสถานีรับสัญญาณดาวเทียม CORS
ข้อจำกัดในการใช้งานระบบโครงข่ายสถานีรับสัญญาณดาวเทียม CORS
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
กองเทคโนโลยีทำแผนที่. คู่มือการรังวัด โดยระบบโครงข่ายการรังวัดด้วยดาวเทียมแบบจลน์ (RTK GNSS Network). กรมที่ดิน กระทรวงมหาดไทย.2564
[Online]. Available: https://www.hii.or.th/งานของเรา/2019/10/02/ระบบนำทางด้วยดาวเทียม-gnss-glob/ [2021, Dec. 24]
โดรน (Drone)
โดรน (Drone) อากาศยานไร้คนขับ หรือที่เรารู้จักอีกชื่อคือ UAV (Unmanned Aerial Vehicle) แต่เดิมโดรนมักถูกใช้ในทางการทหารโดยใช้เป็นอาวุธหรือเครื่องสอดแนม ในปัจจุบันมาการทำโดรนมาใช้งานในหลายๆด้าน ทั้งในด้านการเกษตร ด้านงานเหมืองแร่ ด้านงานก่อสร้าง ด้านงานวิจัย และด้านงานสำรวจ เนื่องจากโดรนช่วยประหยัดเวลาในการสำรวจ แผนที่และข้อมูลที่ได้ยังอัพเดตเป็นปัจจุบัน มีความคมชัดและความละเอียดสูง
ทั้งนี้การสำรวจด้วยโดรนในปัจจุบันได้มีการนำโดรนมาประยุกต์ใช้ทำงานร่วมกับเครื่องรับสัญญาณดาวเทียม GNSS ทำให้แผนที่ที่ได้มีพิกัดตำแหน่งความถูกต้องสูง และแผนที่ที่ได้ยังมีค่าแนวดิ่งที่ชัดเจนกว่าภาพแผนที่ดาวเทียม
ทางบริษัท ยูนิเวอร์แซล คอร์ป ได้มีโอกาสนำเครื่องมือ Hi-Target รุ่น V90Plus GNSS ไปทดสอบการเชื่อมต่อเป็นสถานีฐาน (Base Station) ร่วมกับ Phantom 4 RTK พบว่าเครื่อง V90Plus สามารถส่งค่าปรับแก้ผ่านการให้บริการ NTRIP ให้แก่ Phantom 4 RTK ได้เป็นอย่างดี
***เครื่องรับสัญญาณดาวเทียม GNSS ของ Hi-Target ทุกรุ่นสามารถใช้ในงานสำรวจร่วมกับโดรน (Drone) ได้หากลูกค้าท่านใดสนใจนำเครื่องรับสัญญาณดาวเทียม GNSS ไปใช้ในงานสำรวจรังวัด สามารถติดต่อสอบถามข้อมูลได้ที่บริษัท ยูนิเวอร์แซล คอร์ป จำกัดได้ค่ะ

สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
[Online]. Available: https://www.kokoyadi.com/drone-%E0%B9%82%E0%B8%94%E0%B8%A3%E0%B8%99/ [2021, Dec. 28]
[Online]. Available: https://www.it24hrs.com/2017/drone-uav-thai-laws/ [2021, Dec. 28]
PPK (Post-Processing Kinematic)
การทำวิธี PPK (Post-Processing Kinematic) ต้องใช้ควบคู่กับโดรน โดยโดรนที่ใช้จะต้องเป็นโดรนที่มีตัวรับสัญญาณ (receiver) ค่าพิกัด GNSS แบบ PPK ติดตั้งอยู่กับตัวโดรน ในขณะที่โดรนบินสำรวจก็จะมีการบันทึกข้อมูล GNSS (logs file) เพื่อใช้สำหรับประมวลผลในภายหลังร่วมกับข้อมูล GNSS (logs file) จากสถานีฐาน (Base Station) เช่น CORS Station หรือการตั้งเครื่องรับสัญญาณ GNSS บนหมุดระดับ ณ ตำแหน่งที่ทราบค่า โดยในปัจจุบันนี้ โดรนที่มีตัวรับสัญญาณ receiver รับค่า GNSS มีให้เลือกมากมาย ซึ่งวิธีการจะสะดวกรวดเร็วกว่าการวางเป้าจุด GCP (Ground Control Point) และวิธีการทำ PPK ยังสามารถสำรวจในพื้นที่ที่ไม่สามารถวางเป้า GCP ได้
RTK (Real Time Kinematic)
การทำวิธี RTK (Real Time Kinematic) นี้มีความคล้ายคลึงกับวิธีการทำ PPK โดยข้อแตกต่างของการทำวิธี RTK คือตัวโดรนต้องเป็นตัวรับสัญญาณ (receiver) ค่าพิกัด GNSS แบบ RTK และมีการตั้งสถานีฐาน (Base Station) แบบ RTK เข้ามาเพิ่มเติม ซึ่งการสื่อสารกันระหว่างตัวโดรนและสถานีฐาน (Base Station) จะสื่อสารกันในรูปแบบสัญญาณวิทยุ โดยตัวโดรนจะได้รับค่าปรับแก้ทางตำแหน่งที่มีค่าความถูกต้องแม่นยำสูงอยู่ตลอดเวลาจากสถานีฐาน (Base Station) ขณะบินสำรวจ วิธีการนี้เป็นวิธีการที่สะดวกรวดเร็วที่สุดและให้ค่าความถูกต้องทางตำแหน่งสูง แต่วิธีการนี้ยังมีจุดเสี่ยงอยู่ เนื่องจากสัญญาณวิทยุอาจเกิดการถูกรบกวนหรือสัญญาณอาจมีการหลุดหายไปได้ในขณะการบินสำรวจ โดยปัจจัยที่อาจก่อให้เกิดการหลุดหายไปของสัญญาณ ได้แก่ มีอาคารหรือต้นไม้บดบัง อยู่ใกล้เสาไฟฟ้าแรงสูงหรือแหล่งส่งสัญญาณคลื่นแม่เหล็กมากเกินไป

สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
[Online]. Available: https://www.heliguy.com/blogs/posts/is-rtk-the-future-of-drone-mapping [2021, Dec. 12]
[Online]. Available: https://wingtra.com/ppk-drones-vs-rtk-drones/ [2021, Dec. 12]
[Online]. Available: https://www.ferntechcommercial.co.nz/news/rtk-and-ppk-survey-drones-what-is-the-difference [2021, Dec. 12]
[Online]. Available: https://coptrz.com/ppk-or-rtk-which-is-best/ [2021, Dec. 12]
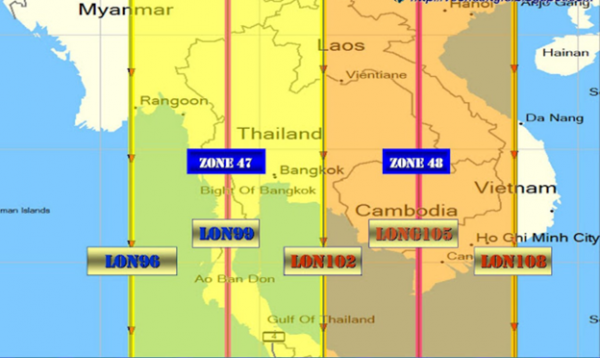
ระบบ UNIVERSAL TRANSVERSE MERCATORS : UTM หรือ ระบบพิกัดฉาก ขอบเขตครอบคลุมพื้นที่ทั้งหมดบนโลก ระหว่าง Latitude 84 องศาเหนือ และ Latitude 84 องศาใต้ มีหน่วยในการวัดเป็นเมตร พื้นที่โซนจะแบ่งตามระยะองศา Latitude เรียกว่า Zone การแบ่ง Zone ในระบบ UTM พื้นที่โลกจะถูกแบ่งออกเป็น 60 โซน ตามองศา Longitude ในแต่ละโซนจะมีระยะห่างโซนละ 6 องศา โดยจะมีค่า Latitude เท่ากับ 600,000 เมตร หรือ 600 กิโลเมตร ซึ่งช่วงโซน ที่ 1 จะอยู่ระหว่าง Longitude ที่ 180 องศาตะวันตก ถึง Longitude ที่ 174 องศาตะวันตกและมีเส้นเมอริเดียนกลาง (Central Meridian) คือเส้น Longitude ที่ 177 องศาตะวันตก ค่าความผิดพลาดไปทางทิศตะวันออก (False easting) เท่ากับ 500,000 เมตร ซึ่งค่า False easting นี้จะเท่ากันทุกโซน โซนที่ 2,3,4,5....,60 จะอยู่ถัดไปทางตะวันออก ห่างกันโซนละ 6 องศา Longitude ซึ่งโซนสุดท้ายคือโซนที่ 60 จะอยู่ระหว่าง Longitude ที่ 174 องศา ตะวันออก ถึง Longitude ที่ 180 องศาตะวันออก ระบบพิกัด UTM เป็น ระบบพิกัดกริด ที่สร้างตามระบบเส้นโครงแผนที่ Mercator ที่เกิดจากการฉาย ภาพเส้นโครงแผนที่ทรงกระบอก ซึ่งแผนที่ส่วนใหญ่ของประเทศไทยจะใช้เส้นโครงแผนที่แบบนี้ เพราะจะได้ พื้นที่ใกล้เคียงความเป็นจริงมากที่สุดในบริเวณเส้นศูนย์สูตร
ที่มา : http://gis-jopk06.blogspot.com/2011/09/
โดยประเทศไทยจะอยู่ที่ Zone 47 และ Zone 48 ซึ่งโซน Zone 47 จะเริ่มต้นที่ Longitude ที่ 96 องศาตะวันออก และสิ้นสุดที่ Longitude ที่ 102 องศา ตะวันออก มีเมอร์ริเดียนกลาง (CM) Longitude ที่ 99 องศาตะวันออก ค่าความผิดพลาดไปทางทิศ ตะวันออก (False easting) เท่ากับ 500,000 เมตรและ Zone 48 จะเริ่มต้นที่ Longitude ที่ 102 องศาตะวันออก และสิ้นสุดที่ Longitude ที่ 108 องศา ตะวันออก มีเมอร์ริเดียนกลาง (CM) Longitude ที่ 105 องศาตะวันออก ค่าความผิดพลาดไปทาง ทิศตะวันออก (False easting) เท่ากับ 500,000 เมตร
ซึ่งแบ่งเส้นเขต 47 และเขต 48 จะอยู่ที่พื้นที่เส้นลองจิจูด 102 ลากผ่าน ได้แก่ 9 จังหวัด 30 อำเภอ 87 ตำบล
1. จังหวัดจันทบุรี อำเภอท่าใหม่, อำเภอแหลมสิงห์, อำเภอแก่งหางแมว, อำเภอเขาคิชฌกูฏ
2. จังหวัดปราจีนบุรี อำเภอนาดี
3. จังหวัดสระแก้ว อำเภอเมืองสระแก้ว, อำเภอวังน้ำเย็น, อำเภอเขาฉกรรจ์, อำเภอวังสมบูรณ์
4. จังหวัดนครราชสีมา อำเภอเมืองนครราชสีมา, อำเภอครบุรี, อำเภอโนนไทย, อำเภอปักธงชัย, อำเภอวังน้ำเขียว, อำเภอพระทองคำ
5. จังหวัดชัยภูมิ อำเภอเมืองชัยภูมิ, อำเภอเกษตรสมบูรณ์, อำเภอภูเขียว, อำเภอคอนสาร, อำเภอเนินสง่า
6. จังหวัดหนองบัวลำภู อำเภอนาวัง
7. จังหวัดขอนแก่น อำเภอชุมแพ
8. จังหวัดเลย อำเภอนาด้วง, อำเภอปากชม, อำเภอภูกระดึง, อำเภอผาขาว, อำเภอเอราวัณ
9. จังหวัดนราธิวาส อำเภอตากใบ, อำเภอสุไหงโก-ลก, อำเภอสุไหงปาดี
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
[Online]. Available: http://forestinfo.forest.go.th/55/Manual/ตรวจสอบแนวเขตป่าสงวน2.pdf [2021, Dec. 01]
[Online]. Available: https://www.facebook.com/SocialOnMap/photos/a.1501376693448456/19580855 97777561/?type=3&theater [2021, Dec. 01]
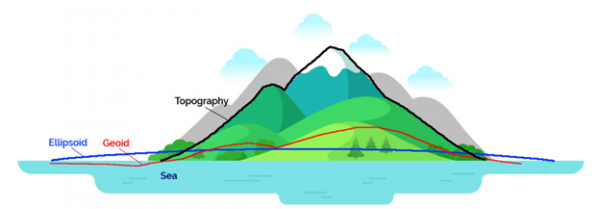
Geoid (จีออยด์)
(ที่มา : https://app1.sla.gov.sg/SIRENT/About/SGEOID09)
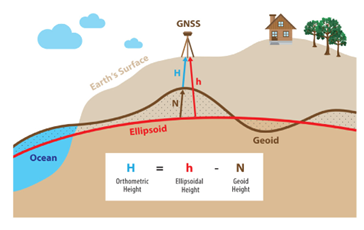
การใช้งานเครื่องรับสัญญาณดาวเทียม GPS ด้านงานสำรวจรังวัดในประเทศไทย เริ่มเป็นที่นิยมอย่างมากเนื่องจากเป็นวิธีการที่ได้ค่าความถูกต้องสูง การรังวัดด้วยเครื่องรับสัญญาณดาวเทียม GPS จะให้ผลออกมาในรูปแบบสามมิติ คือค่าทางราบและค่าความสูง ค่าความสูงเป็นค่าความสูงเหนือรูปทรงรี ที่เรียกว่า ความสูงเหนือ ellipsoid การทำงานสำรวจรังวัดจะใช้ค่าทางดิ่งที่เป็นค่าความสูงจากระดับเหนือระดับทะเลปานกลาง ที่เรียกว่า ความสูงออร์โทเมตริก (Orthometric height) หรือความสูงเหนือพื้นผิวยีออยด์ (Geoid) และในปัจจุบันประเทศไทยมีผลงานวิจัยอยู่หลายเรื่องที่ศึกษาเกี่ยวกับการประยุกต์ใช้เครื่องรับสัญญาณดาวเทียม GPS ในด้านการหาค่าระดับที่ให้ค่าความถูกต้องอยู่ในระดับเซนติเมตร เนื่องจากการรังวัดระดับแบบเดิมเป็นวิธีการที่มีค่าใช้จ่ายสูง สิ้นเปลืองเวลา และในบ้างพื้นที่ไม่สามารถถ่ายค่าระดับเข้าไปในพื้นที่ได้ ทำให้เครื่องรับสัญญาณ GPS มีบทบาทในการทำงานรังวัดระดับได้
หลักการคำนวณหาค่าระดับจากการรังวัดด้วยเครื่องรับสัญญาณ GPS
การที่จะแปลงค่าความสูงเหนือทรงรีมาเป็นค่าความสูงเหนือระดับทะเลปานกลางหรือความสูงออร์โทเมตริกจำเป็นต้องทราบค่าความต่างระหว่างพื้นผิวทรงรีและพื้นผิวยีออยด์ (Geoid-ellipsoid separation) ซึ่งจะเรียกโดยย่อว่า ‘N’ ความสัมพันธ์ระหว่าง N กับความสูงเหนือทรงรีและความสูงออร์โทเมตริกสามารถแสดงออกมาเป็นสมการได้ดังนี้
(ที่มา : Müge Albayrak et al.,2020 )
จากสมการข้างต้นจะพบว่าค่าความถูกต้องของค่าความสูงเหนือระดับทะเลปานกลางหรือความสูงออร์โทเมตริกจะขึ้นอยู่กับค่าความถูกต้องของค่าความสูงเหนือทรงรีที่ได้จากงานรังวัดด้วยเครื่องรับสัญญาณ GPS และค่าความถูกต้องของการหาค่า N มีความเป็นไปได้ที่จะหาค่าความสูงเหนือทรงรีที่ถูกต้องในระดับ 1-2 ppm. ดังนั้นค่าความถูกต้องของ N จึงเป็นปัจจัยสำคัญที่มีผลต่อการหาค่าระดับจากการรังวัดด้วยเครื่องรับสัญญาณดาวเทียม GPS
ทั้งนี้ในการใช้เครื่องรับสัญญาณดาวเทียม GPS ในการทำงานรังวัดระดับของประเทศไทยจำเป็นต้องใช้แบบจำลอง ยีออยด์ของพิภพภาคพื้นดิน (Global geoid model) เข้ามาเป็นตัวช่วยในการทำงาน ซึ่งปัจจุบันประเทศไทยมีการนำแบบจำลอง ยีออยด์ของพิภพภาคพื้นดิน (Global geoid model) มาใช้ในงานรังวัดระดับคือ EGM 1996, EGM2008 และ TGM2017 โดยให้ค่าความถูกต้องอยู่ในระดับเซนติเมตร
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
เอกจิต เพียรพิทักษ์ ความรู้เกี่ยวกับ GPS ที่มา http://te-e-trading.blogspot.com/p/blog-page.html. 2564
พ.อ.เอื้อมเกียรติ เจริญสม รายงานผลการศึกษาวิจัย เรื่องค่าตัวแปรในการเปลี่ยนพื้นหลักฐานของ ผท.ทหาร : WGS 84 กับ อินเดียน 1975 กรมแผนที่ทหาร. 2564
ร.ท.วัลลพ ตาเขียว เอกสารประกอบวิชาการ การสำรวจด้วยดาวเทียม (Satellite Surveying) กรมแผนที่ทหาร. 2564
ระบบพิกัด (Coordinate System)
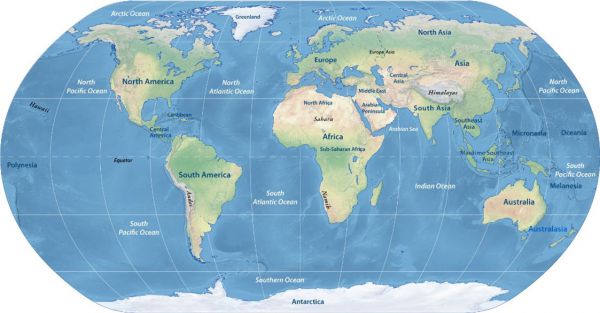
ที่มา : https://www.nationsonline.org/oneworld/continents_map.htm
ระบบพิกัด (Coordinate System) เป็นระบบที่สร้างขึ้นสำหรับให้อ้างอิงในการกำหนดตำแหน่งหรือบอกตำแหน่งพื้นโลกที่มีลักษณะเป็นตารางโครงข่ายที่เกิดจากการตัดกันของเส้นตรงสองจุดที่ถูกกำหนดให้วางตัวในแนวเหนือ-ใต้ และแนวตะวันออก-ตะวันตก ตามแนวของจุดศูนย์กำเนิด (Orgin) ค่าพิกัดที่ใช้อ้างอิงในการระบุตำแหน่งต่างๆจะใช้ค่าของหน่วยที่นับออกจากจุดศูนย์กำเนิดเป็นระยะเชิงมุม (Degree) หรือเป็นระยะทาง (Distance) ไปทางเหนือหรือใต้และตะวันออกหรือตะวันตก ในปัจจุบันระบบพิกัดที่นิยมใช้อ้างอิงตำแหน่งบนแผนที่มีอยู่ 2 ระบบ
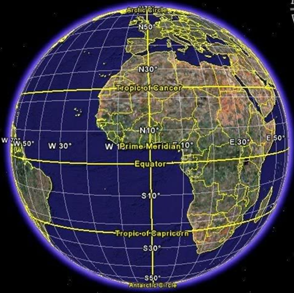
1) ระบบพิกัดภูมิศาสตร์ (Geographic Coordinate systems)
เป็นระบบที่ใช้พื้นผิวสามมิติของรูปทรงกลมในการกําหนดตําแหน่งบนพื้นผิวโลก โดยอ้างอิงด้วยค่าของเส้นลองจิจูด (Line of longitude) และเส้นละติจูด (Line of latitude) ค่าทั้งสองเป็นค่าวัดมุมที่ศูนย์กลางของโลก โดยปกติมีค่าเป็นองศา ลิปดา และฟิลิปดา (Degree, minute และ second - DMS) หรือเป็นค่าทศนิยมได้เช่นกัน โดยค่าลองจิจูดมีค่า 0-180 องศา เริ่มต้นจากเส้นเมริเดียนแรก (Prime meridian) ซึ่งมีค่าลองจิจูดเป็น 0 องศา ไปทางตะวันออกมีค่าเป็นบวกและมีอักษร E กํากับ ไปทางทิศตะวันตกมีค่าเป็นลบและมีตัวอักษะ W กํากับ และค่าละติจูดมีค่า 0-90 องศา เริ่มต้นจากเส้นระนาบศูนย์สูตร (Equator) ซึ่งมีค่าละติจูดเป็น 0 องศา ขึ้นไปทางขั้วโลกเหนือมีค่าเป็นบวกและมีตัวอักษร N กํากับ และลงไปทางขั้วโลกใต้มีค่าเป็นลบและมีตัวอักษร S กํากับ ดังนั้นเส้นลองจิจูดจึงเปรียบเสมือนเส้นทีลากเชื่อมต่อจากขั้วโลกสู่ขั้วโลก และเส้นละติจูดเป็นเส้นที่ลากขนานกับเส้น Equator ไปทางขั้วโลกเหนือและขั้วโลกใต้ในทางราบ เมื่อนําชุดของเส้นทั้งสองมาลากตัดกันจะเกิดเป็น เส้นข่ายกริด
ที่มา : https://sites.google.com/site/daendinthinphuthi/meing-phu-thi/kar-kahnd-khet-phakh-wela
2) ระบบพิกัดกริดแบบ UTM (Universal Transverse Mercator co-ordinate System)
เป็นระบบพิกัดฉากที่ได้จากการตัดกันของระบบเส้นตรงที่ขนานกัน 2 ชุด ซึ่งมีระยะห่างของเส้นที่ขนานเท่ากัน โดยการตัดกันแบบตั้งฉากก่อให้เกิดเป็นรูปทรงสี่เหลี่ยมจัตุรัสที่มาขนาดเท่ากันและมีหน่วยวัดระยะทางเป็นเมตรในมาตราเมตริกซึ่งทําให้สามารถวัดระยะทางได้โดยตรง ไม่จําเป็นต้องแปลงหน่วยวัดระยะทางจากมุมเป็นระยะทางเหมือนในระบบพิกัดภูมิศาสตร์ ระบบพิกัด UTM เป็นระบบที่ได้จากการฉายภาพแบบจําลองพื้นผิวโลกลงบนแผ่นผิวรูปทรงกระบอก ซึ่งมีจุดสัมผัสแบบขวาง โดยตัดพื้นผิวแบบจําลองของพื้นผิวโลกในระยะที่ห่างจากขั้วโลกด้านละ 180 กิโลเมตร
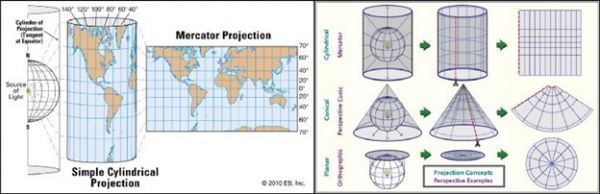
ที่มา : https://ichi.pro/th/kar-thakhwam-kheaci-kar-khad-karn-phaenthi-152986411936303
UTM Zone ในประเทศไทย
ประเทศไทยเป็นพื้นที่ที่ตั้งอยู่ในระหว่าง 2 โซน ได้แก่ Zone 47 และ Zone 48
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: عنوان البريد الإلكتروني هذا محمي من روبوتات السبام. يجب عليك تفعيل الجافاسكربت لرؤيته.
www.universalcorp.co.th
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4
อ้างอิง
สัญญา สราภิรมย์. (2549). ระบบสารสนเทศภูมิศาสตร์. มหาวิทยาลัยเทคโนโลยีสุรนารี.
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน). (2015). ระบบพิกัดในแผนที่.
[Online]. Available: https://www.gistda.or.th/main/th/node/873 [2021, April. 02]
Dana, P. H. (1997). Unit 013 - Coordinate Systems Overview. The NCGIA Core Curriculum in GIScience.
[Online]. Available: http://www.ncgia.ucsb.edu/education/curricula/giscc/units/u013/u013_f.html [2021, April. 02]


การรังวัดแบบจลน์ (Kinematic Survey)
การรังวัดแบบจลน์คือวิธีการหาตำแหน่งในขณะที่เครื่องรับสัญญาณเคลื่อนที่การรังวัดแบบจลน์ถูกพัฒนามาจากการรังวัดแบบสถิตเป็นวิธีการที่ทำให้หาตำแหน่งของจุดจำนวนมากได้อย่างรวดเร็ว โดยมีความถูกต้องถึงระดับเซนติเมตร ในการรังวัดแบบจลน์เครื่องรับสัญญาณเครื่องหนึ่งจะถูกวางไว้ที่สถานีหลัก (หมุดหลักฐานโครงข่าย) ตลอดเวลา ส่วนเครื่องรับสัญญาณดาวเทียมอีกเครื่องหนึ่งซึ่งเรียกว่า เครื่องรับสัญญาณดาวเทียมจร ( rover) จะนำไปวางตามจุดใดๆ ที่ต้องการทราบตำแหน่งเพียงชั่วระยะเวลาสั้นๆ เท่านั้น แล้วก็เคลื่อนย้ายไปยังจุดถัดไปวิธีการนี้เรียกว่า "stop and go kinematic" หรืออีกวิธีหนึ่งเป็นการติดตั้งเสาอากาศ (จานรับสัญญาณ) ไว้บนยานพาหนะแล้วเคลื่อนที่ไปเรื่อยๆ ซึ่งเรียกว่า "continuous kinematic" ทั้งสองวิธีมีหลักการคำนวณตำแหน่งที่เหมือนกัน มีข้อแตกต่างตรงที่ "continuous kinematic" จะบันทึกข้อมูลอย่างต่อเนื่องไปเรื่อยๆ และสามารถนำมาคำนวณหาตำแหน่งได้ทุกๆจุดที่มีการบันทึกข้อมูลไว้ สำหรับ " stop and go kinematic" แม้ว่าจะมีการบันทึกข้อมูลอย่างต่อเนื่องเช่นเดียวกัน แต่จะนำเอาเฉพาะข้อมูลในขณะหยุดอยู่กับที่เท่านั้นมาคำนวณตำแหน่งและนำค่ามาเฉลี่ยกัน การรังวัดแบบจลน์แม้จะหาค่าพิกัดได้อย่างรวดเร็วแต่ข้อจำกัดคือเครื่องรับสัญญาณดาวเทียมต้องรับสัญญาณจากดาวเทียมได้ไม่น้อยกว่า 4 ดวงตลอดเวลา เพื่อให้มีข้อมูลเพียงพอสำหรับการหาจำนวนคลื่นเต็มรอบ (Ambiguity) แม้แต่ในขณะที่กำลังเคลื่อนย้ายจากจุดหนึ่งไปยังอีกจุดหนึ่งที่ต้องการทราบค่าพิกัด หากมีการหลุดของสัญญาณจะต้องเริ่มกระบวนการเริ่มงาน (Initialization) ใหม่โดยระยะเส้นฐานที่มากที่สุดที่ยังคงผลลัพธ์ที่น่าเชื่อถืออยู่ที่ประมาณ 10 - 15 Km. (สำหรับเครื่องรับสัญญาณแบบสองความถี่)
การรังวัดแบบจลน์ในทันที (Real Time Kinematic Survey: RTK)
วิธีการนี้มักถูกเรียกโดยย่อว่า RTK ซึ่งหลักการทำงานของวิธีการรังวัดหาค่าพิกัดแบบสัมพัทธ์ด้วยวิธีการทำงานแบบจลน์ในทันทีนั้น คล้ายคลึงกับวิธีการแบบจลน์ คือ ต้องใช้เครื่องรับสัญญาณดาวเทียมอย่างน้อย 2 เครื่อง โดยเครื่องที่หนึ่งถูกวางไว้บนหมุดหลักฐานที่ทราบค่าพิกัดหรือสถานีหลัก ส่วนเครื่องรับเครื่องที่สองถูกนำไปวางรับสัญญาณตามจุดที่ ต้องการทราบค่าพิกัด แต่กรณีของวิธีการหาค่าพิกัดแบบจลน์ในทันทีนั้น เครื่องรับสัญญาณมีการติดตั้งอุปกรณ์สื่อสารระหว่างเครื่องรับทั้งสอง ซึ่งอาจเป็นเครื่องรับและส่งคลื่นวิทยุหรือการใช้โทรศัพท์มือถือและอาศัยสัญญาณอินเทอร์เน็ต ทำให้สถานีรับจรสามารถทราบค่าตำแหน่งที่ถูกต้องหน้างานในทันที โดยไม่ต้องผ่านการประมวลผลด้วยซอฟต์แวร์ภายหลัง การหาค่าพิกัดของตำแหน่งจุดต่างๆ ด้วยวิธีนี้ เครื่องรับสัญญาณดาวเทียมที่สถานีหลักและสถานีรับจรต้องรับข้อมูลจากดาวเทียมกลุ่มเดียวกันและช่วงเวลาเดียวกันอย่างน้อย 5 ดวง และเครื่องรับสัญญาณที่ใช้จะต้องเป็นเครื่องรับสัญญาณแบบสองความถี่เท่านั้น วิธีการนี้สามารถให้ค่าความถูกต้องในระดับ 1 -5 เซนติเมตร (สำหรับเส้นฐานที่ยาวไม่เกิน 15 กิโลเมตร) การรังวัดแบบจลน์ในทันทีที่ใช้ระบบเครือข่ายสถานีฐานจีพีเอส (network-based RTK) มีหลักในการทำงานคล้ายคลึงกับวิธีการรังวัดแบบจลน์ในทันที แต่แตกต่างกันที่ ผู้ใช้งานจำเป็นต้องขอรหัสผู้ใช้ (user name) จากผู้ให้บริการระบบเครือข่ายสถานีฐานจีพีเอส (ซึ่งในประเทศไทยให้บริการโดยกรมที่ดิน) โดยที่ผู้ใช้งานใช้เครื่องรับสัญญาณเพียงเครื่องเดียวไปวางตามจุดที่ต้องการทราบค่าพิกัดภายในพื้นที่ระบบเครือข่ายสถานีฐานฯ วิธีการนี้สามารถให้ค่าความถูกต้องในระดับ 1-5 เซนติเมตร
อ้างอิง
ร.ท.วัลลพ ตาเขียว เอกสารประกอบวิชาการ การสำรวจด้วยดาวเทียม (Satellite Surveying) กรมแผนที่ทหาร. 2560.




