ผู้จัดจำหน่ายและนำเข้าเครื่องมือสำรวจHI-TARGET | โทร 02-019-1713, 02-318-3688, 02-318-3689

ที่มา : https://www.ocean-yachting.com/gps-error-sources
ความคลาดเคลื่อนสามารถเกิดขึ้นได้ในงานรังวัดเสมอ ไม่ว่าจะเป็นความคลาดเคลื่อนที่เกิดจากอุปกรณ์หรือสภาพแวดล้อมในขณะทำงาน หากเราสามารถหลีกเลี่ยงค่าความคลาดเคลื่อนเหล่านี้ให้เกิดน้อยลงก็ส่งผลดีต่องานรังวัดด้วยดาวเทียมระบบ GPS
ความคลาดเคลื่อนที่ส่งผลต่องานรังวัดด้วยดาวเทียมระบบ GPS มีดังต่อไปนี้
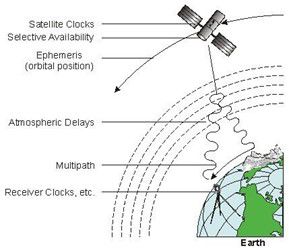
- ความคลาดเคลื่อนของวงโคจรดาวเทียม (Ephemeris Error) วงโคจรดาวเทียมที่ผู้ใช้รับมานั้น เป็นวงโคจรที่ได้จากการคำนวณล่วงหน้า ดังนั้น ตำแหน่งดาวเทียม (อิฟิเมอริสดาวเทียม) จึงเป็นค่าจากการคำนวณล่วงหน้า โดยอาศัยรูปจำลองของแรงภายนอกต่างๆ ที่กระทำต่อดาวเทียม เช่น แรงดึงดูดจากดวงจันทร์ แรงดึงดูดจากดวงอาทิตย์ ลมสุริยะ ซึ่งส่งผลต่อตำแหน่งวงโคจรของดาวเทียม รูปจำลองที่ใช้อาจไม่สมบูรณ์ ฉะนั้นตำแหน่งของดาวเทียมที่ได้จากอิฟิเมอริสดาวเทียม ที่ส่งกระจายลงมาพร้อมสัญญาณดาวเทียมนั้นจึงไม่ถูกต้อง ดังนั้นส่วนควบคุมจึงจำเป็นต้องปรับแก้ให้เที่ยงตรงอยู่เสมอ
- ความคลาดเคลื่อนของนาฬิกาบนดาวเทียม (GPS Clock Error) เวลา GPS คือ เวลาที่ใช้เป็นมาตรฐานอ้างอิงในระบบ GPS โดยมีสถานีควบคุมหลักเป็นผู้ดูแลรักษาเวลา GPS ให้มีความถูกต้อง โดยปกติเวลา GPS และเวลามาตรฐานสากล (UTC) จะถูกรักษาให้ต่างกันไม่เกิน 100 ns (10-7 วินาที) แต่ถึงแม้ว่านาฬิกาอะตอมที่เป็นตัวกำหนดเวลาบนดาวเทียมจะมีความถูกต้องสูง แต่ก็ยังคงมีความผิดพลาดอยู่ (ประมาณ 3 nanosecond) ส่งผลให้คลื่นที่ส่งมาผิดพลาดด้วย นอกจากความคลาดเคลื่อนในส่วนของการเทียบเวลาแล้ว ยังมีความคลาดเคลื่อนที่เกิดจากความไม่เสถียรของมาตรฐานความถี่ของนาฬิกาบนดาวเทียมที่เรียกว่า ดริฟท์ (Drift)
- ความคลาดเคลื่อนของการหักเหในชั้นบรรยากาศ (Atmospheric Errors) ชั้นบรรยากาศที่มีผลต่อการหักเหของคลื่นวิทยุหรือทําให้เส้นทางเคลื่อนที่เบี่ยงเบนไป คือ ชั้นไอโอโนสเฟียร์และชั้นโทรโพสเฟียร์
- ความคลาดเคลื่อนเนื่องจากเกิดคลื่นสะท้อน (Multipath Errors) คลื่นสะท้อนเกิดจากคลื่นสัญญาณ GPS เดินทางไปกระทบวัตถุเกิดการสะท้อนของคลื่นก่อนเข้าสู่เครื่องรับสัญญาณ วัตถุสะท้อนคลื่น เช่น ผิวน้ำผนังคอนกรีต ส่งผลกับรหัสและคลื่นส่ง
- ความคลาดเคลื่อนเนื่องจากนาฬิกาของเครื่องรับสัญญาณดาวเทียม (Receiver Clock Errors) เครื่องรับสัญญาณไม่จำเป็นต้องมีนาฬิกาที่มีความถูกต้องสูงมาก ทั้งนี้เพราะเวลาที่ถูกต้องสามารถหาได้จากสัญญาณดาวเทียมที่เป็นข้อมูลเวลา ซึ่งเครื่องรับสามารถถอดรหัสได้ก็จะรู้เวลา GPS
- การเกิดคลื่นหลุด (Cycle Slip) คลื่นหลุด คือ การขาดหายไปเป็นช่วงๆ ของคลื่น ทำให้เครื่องรับไม่สามารถบันทึกข้อมูลได้อย่างต่อเนื่องมีสาเหตุหลายประการ คือ มีสิ่งกีดขวางการเดินทางของสัญญาณดาวเทียม เช่น ต้นไม้ อาคาร, Noise ของสัญญาณขนาดใหญ่ เช่น สัญญาณถูกรบกวนจากคลื่นวิทยุ, การเกิดคลื่นสะท้อน
- ความคลาดเคลื่อนของเครื่องรับ (Receiver Error) ความคลาดเคลื่อนของเครื่องรับ (Noise) มีสาเหตุการเกิดหลายอย่างเช่น ความไม่เสถียรของออสซิลเลเตอร์ จุดศูนย์กลางเฟสของเสาอากาศ การ BIAS ระหว่างช่องรับสัญญาณ Noise ในการรังวัดขึ้นอยู่กับความเร็วของสัญญาณที่ได้รับ โดยคำนวณได้จากกฎหัวแม่มือ นำมาใช้ในการหาขนาดของ Noise กล่าวคือ 1%ของค่าความยาวคลื่นของสัญญาณที่กำลังรังวัด
- ความผิดพลาดในการวัดความสูงของเสาอากาศ (Measurement Error) เป็นความผิดพลาดที่ใหญ่ที่สุดที่เกิดจากผู้ปฏิบัติการรังวัดความสูงเสาอากาศในสนามมีความสำคัญเป็นอย่างยิ่ง เนื่องจากสัญญาณดาวเทียมที่รังวัดได้จะถูกบันทึกและคำนวณบนเสาอากาศ ดังนั้น ค่าความสูงของเสาอากาศที่วัดได้จะใช้เป็นค่าในการทอนค่าความสูงของเสาอากาศลงสู่หัวหมุดหลักฐาน การวัดค่าความสูงของเสาอากาศจะมีผลกระทบโดยตรงต่อความสูงของหมุดหลักฐาน ดังนั้นผู้ปฏิบัติควรระลึกถึงและระมัดระวังให้มากที่สุด
- ความคลาดเคลื่อนเนื่องจากการวางตัวของดาวเทียม (Dilution of Precision: DOP) การหาค่าพิกัดของตำแหน่งของวัตถุ นอกจากต้องรับสัญญาณดาวเทียมให้ได้อย่างน้อย 4 ดวงการวางตำแหน่งของดาวเทียมบนท้องฟ้าก็เป็นส่วนสำคัญ ค่า DOP เป็นค่าที่ได้จากกระบวนการทางคณิตศาสตร์ซึ่งบ่งบอกความไม่แน่นอนด้านตำแหน่ง ค่า DOP ที่สูงให้ค่าความไม่แน่นอนของตำแหน่งมากกว่า ค่า DOP ที่ต่ำ
สนใจติดต่อ บริษัท ยูนิเวอร์แซล คอร์ป จำกัด
☎: 095-596-5619 หรือ 0-2318-3688-9
📧: This email address is being protected from spambots. You need JavaScript enabled to view it.
https://www.universalcorp.co.th/
#HiTarget #GNSS #UniversalCorp #V30Plus #V200 #V90Plus #iRTK5 #iRTK4#เครื่องมือสำรวจ#GPS
อ้างอิง
วิชัย เยี่ยงวีรชน. การสํารวจรังวัดทฤษฎีและการประยุกต์ใช้ (พิมพ์ครั้งที่ 3) กรุงเทพมหานคร : สํานักพิมพ์แห่งจุฬาลงกรณ์มหาวิทยาลัย.2552
[Online]. Available: http://osm.ldd.go.th/web_forest/pdf_file/gps1.pdf [2022, Aug. 19]
[Online]. Available: http://gps.rid.go.th/engineer/unitschool/%E0%B8%9C%E0%B8%A5%E0%B8%87%E0%B8%B2%E0%
B8%99%E0%B9%80%E0%B8%A3%E0%B8%B7%E0%B9%88%E0%B8%AD%E0%B8%87%E0%B8%97%E0%B8%B5%E0%B9%882.pdf [2022, Aug. 19]
[Online]. Available: https://www.ocean-yachting.com/gps-error-sources [2022, Aug. 19]




